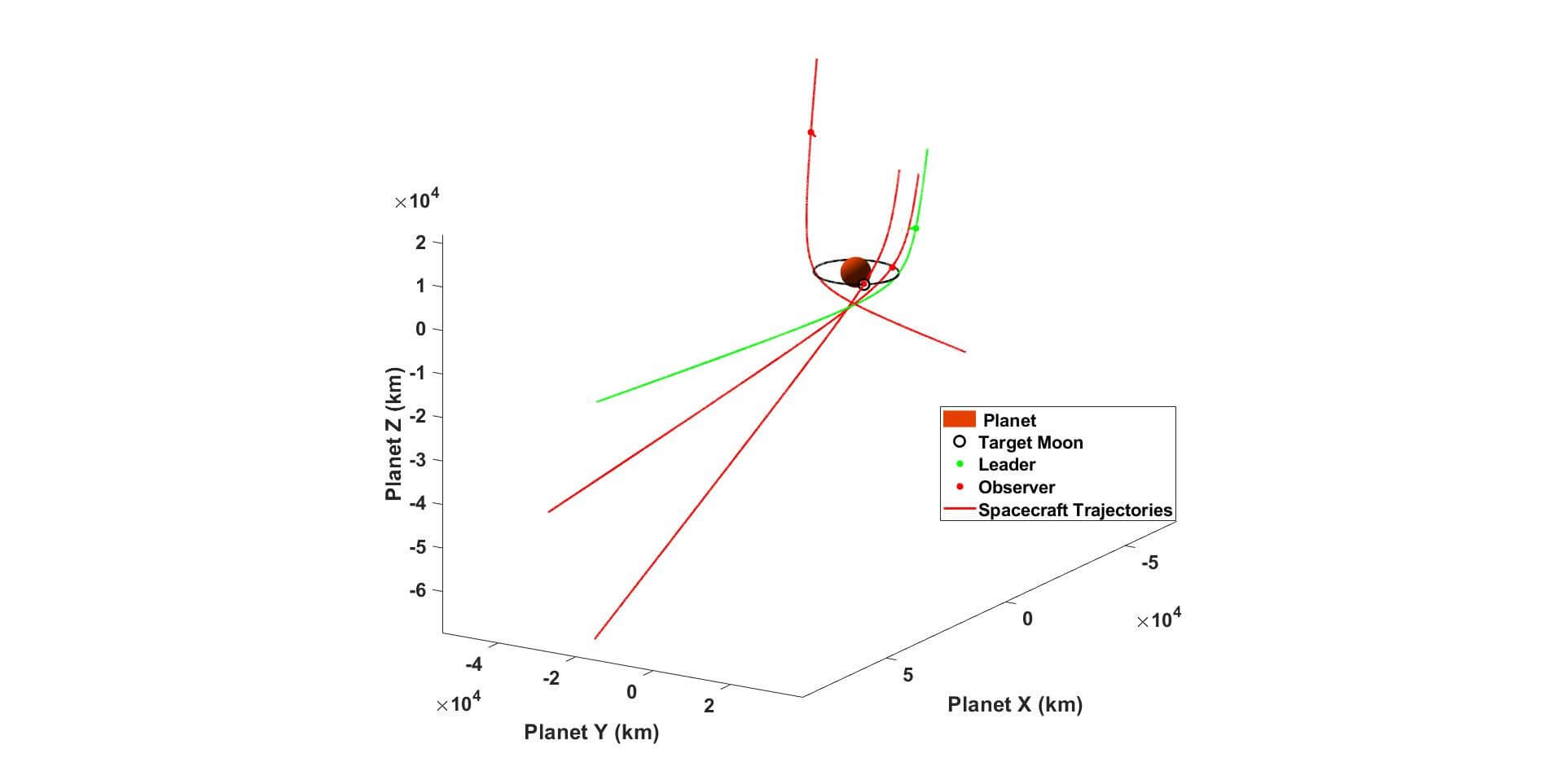
Small-bodies such as asteroids contain large reserves of resources such as water, iron, titanium, nickel, platinum, and silicates . Key to finding these resources is to prospect scores of asteroids for resource material. Our solutions to resource prospecting involve using Machine Learning to automatically develop advanced reconnaissance mission concepts automatically using spacecraft swarms to flyby and fully map scores of asteroid for key resources and strategic sites. There are ambitious plans at extracting these resources on-site, which if successfully demonstrated can significantly reduce the cost and complexity of space exploration and enable off-world colonization. One of the key resources, water could be used as a spacecraft propellant in the form of water-steam or electrolyzed into hydrogen and oxygen and combusted. However, water expected on these asteroids likely contain dissolved carbon-monoxide and sulfur compounds that poison modern high performance electrolyzers. End to end systems approaches are needed to overcome these technical barriers and make propellant extraction practical.
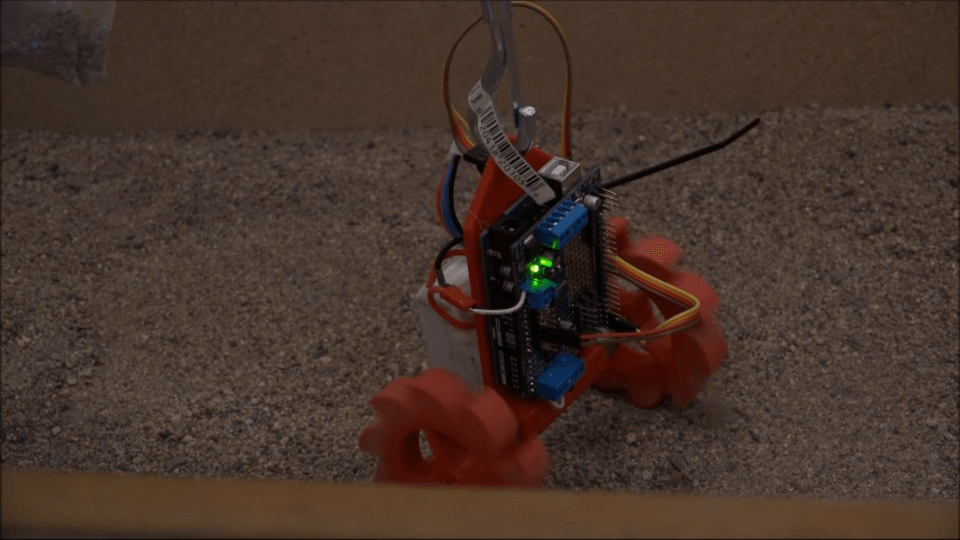
While there has been significant progress reported in ISRU techniques on the surfaces of Moon and Mars, the extremely low-gravity environments on asteroids, on the other hand, limit our ability to perform ISRU tasks. Challenges to successfully extracting resources from asteroid surfaces includes low escape-velocity, lack of rigid surface and lack of collection mechanisms. Additionally, the non-uniform shapes of these asteroids result in a heterogeneous distribution of these resources. Our work focuses on developing excavation and prospecting solutions resulting in successful ISRU activities. Our work has involved optimizing existing excavation implements such as bucketwheels to operate in a milli-gravity environment and developing robotic testbeds for verification and validation. Bucketwheels are efficient excavation implement as they can operate continously and have been found to be suitable in low-gravity environments. One of the above figures shows a scaled-down prototype of counter-rotating bucket wheels to extract regolith from Martian moon Phobos, thought to be a captured asteroid.